Робот Spot от Boston Dynamics давно будоражил мой мозг. Красивая походка, симпатичный робот-пес, большие функциональные возможности, например, будет пиво носить из холодильника)))
Изначально я хотел сделать свой вариант конструкции, но наткнулся в сети на многочисленные варианты миниатюрной версии робота в свободном доступе.
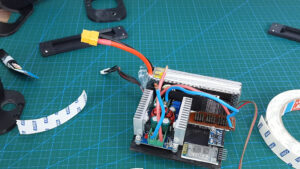
Для меня 3D-печать не проблема, и уже скоро робот из компьютерной модели превратился в настоящего и сделал свои первые шаги.