

Как все начиналось
Прошло два года после создания своего первого робототехнического проекта – кибернетической руки. Меня вновь посетило вдохновение и следующей целью стало изготовление своего собственного гексапода – робота, перемещающегося на шести ногах.
В итоге получился вот такой красавец больше похожий на муравья.
Он сильно отличается от изначального проекта по ряду причин. Но, давайте расскажу обо всем по порядку. Итак, что я хотел получить в итоге:
- шестиногое механическое насекомое;
- каждая нога должна иметь три степени свободы;
- радиоуправление по Bluetooth-каналу.
Большинство покупных электронных изделий было приобретено на AliExpress. Я заказал:
- 18 сервоприводов MG995 (из расчета три привода на каждую ногу);
- модуль с микроконтроллером STM32F103С8Т6.
Сервоприводы MG995 уже зарекомендовали себя в моем предыдущем проекте. Они обладают высоким вращательным моментом и относительно дешевы. Так как конструкция довольно тяжелая (несколько килограммов), то момент электроприводов – определяющая характеристик. Да и как показывает практика, мощность лишней не бывает.
Контроллер в серии STM – самый оптимальный для данной задачи. Плата малогабаритная и в ней есть вся необходимая мне периферия.
Модуль для радиосвязи «одолжил» на работе. По сути это более сложный вариант распространенного на Ali модуля НС-05. В качестве пульта дистанционного управления использовал свой смартфон. К этому времени я уже худо-бедно освоил разработку программ на Java под Android. Дело оставалось за механической частью, которую я вознамерился сделать своими собственными руками (как оказалось позднее я недооценил всю сложность этого шага). Нарисовав модель будущего повелителя насекомых, я взялся за дело.

Сборка и изготовление деталей
Умом я понимал, что конструкция должна быть металлической. Но вместо того, чтобы заказать детали на каком-нибудь заводе, я возомнил себя великим механиком и решил все сделать сам. Вооружившись ножницами по металлу и алюминиевым листом (за 300 рублей), я нарезал необходимые детали, согнул как надо, рассверлил отверстия.
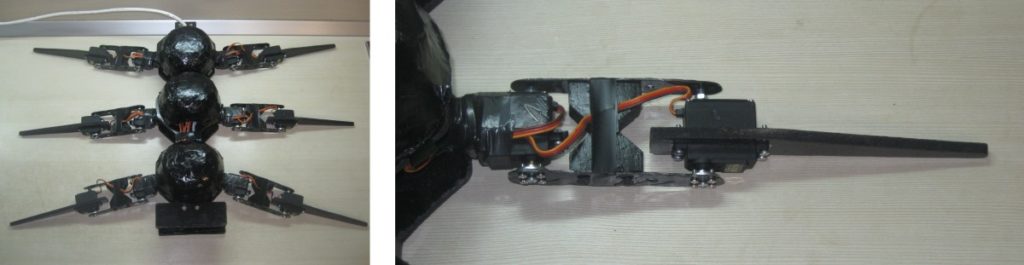
Наиболее сложным в изготовлении оказался плечевой сустав насекомого. Для соединения двух сервоприводов между собой необходима деталь, которая изготавливается методом гибки показанной заготовки. Гнуть заготовку можно в тисках с помощью молотка. В общем, это целое искусство, которым я не владел ранее. Посоветую лишь одно: отверстия надо сверлить в самом конце после формовки детали, приложив сервопривод в качестве шаблона.

Материал, который я выбрал, был слишком мягкий и легко гнулся руками, это была первая моя ошибка. Но я довел дело до конца и получился вот такой монстр.

Конструкция оказалась нежизнеспособной. При ходьбе он раскачивался, ноги постоянно колебались из стороны в сторону, в общем получилось безобразно. На этом мой проект чуть было не закончился.
Срочно меняем конструкцию
Маленько отдышавшись и набравшись новых сил и идей, я снова бросился в бой. Раз не суждено мне быть великим токарем, попробую стать отличным столяром. И я решил сделать большую часть деталей из дерева, точнее из тонкого ДСП толщиной 8мм. Старая полка тут же пошла на запчасти. Корпус приобрел другую форму и теперь стал похож на муравья. А средняя часть ноги была усилена ребром жесткости – деревянной вставкой в виде бабочки.
Полный перечень механических деталей и их габаритные размеры:
- деревянная пластина корпуса 470 х 130 х 8мм – 2 шт.;
- сервопривод MG995 (шкив в комплекте надо рассверлить под М3) – 6 шт.;
- металлическая заготовка 210 х 50 х 2мм для Coxa – 6 шт.;
- металлическая заготовка 120 х 20 х 2мм для Femur – 12 шт.;
- деревянная заготовка 200 х 30 х 7мм для Tibia – 6 шт.;
- деревянная вставка для Femur 55 х 40 х 20мм – 6 шт.;
- деревянная вставка для корпуса 55 х 40 х 20мм – 4 шт.;
- винт М4х10 с гайкой М4 для второй оси сервопривода – 18 шт.;
- винт М3х16 – 6 шт.;
- винт М3х8 – 76 шт.;
- гайка М3 – 32 шт.;
- шуруп 3.5х16 – 36 шт.;
- шайбы по необходимости.
И, о чудо! Конструкция стало более жесткой, ноги моего механического друга перестали подгибаться под весом его туловища. Муравей теперь мог ходить нормальной походкой и стал выглядеть более похожим на своего прототипа из живой природы.
На этом часть моей статьи про конструкцию и сборку подходит к концу. Алгоритм управления сервоприводами для микроконтроллера, способы ходьбы и поворотов тела, медленное движение, а также наиболее узкие места в программном обеспечении, я подробно опишу в следующей главе «Программирование и алгоритмы». Спасибо за внимание!
Классный робот! Все сами делали?
Да, все сам делал, из дерева. Как папа Карло)))