

Как все начиналось
Наконец-то я получил долгожданный набор механических деталей для робота-паука. А к ним в придачу я еще заказал литий-полимерный аккумулятор, конвертер на 30А и микроконтроллер.
В прошлом цикле статей я поэтапно показал, как делал подобного робота из ДСП. Точность изготовления была не очень, большие люфты, автономного питания не было. Да и весила вся конструкция килограмм пять, не меньше. Исправим все эти недостатки в новой конструкции. Итак, начнем создавать нового монстра, он будет называться «Робот-паук 2019».
Детали
Для сборки робота я приобрел на Ali Express следующие детали:

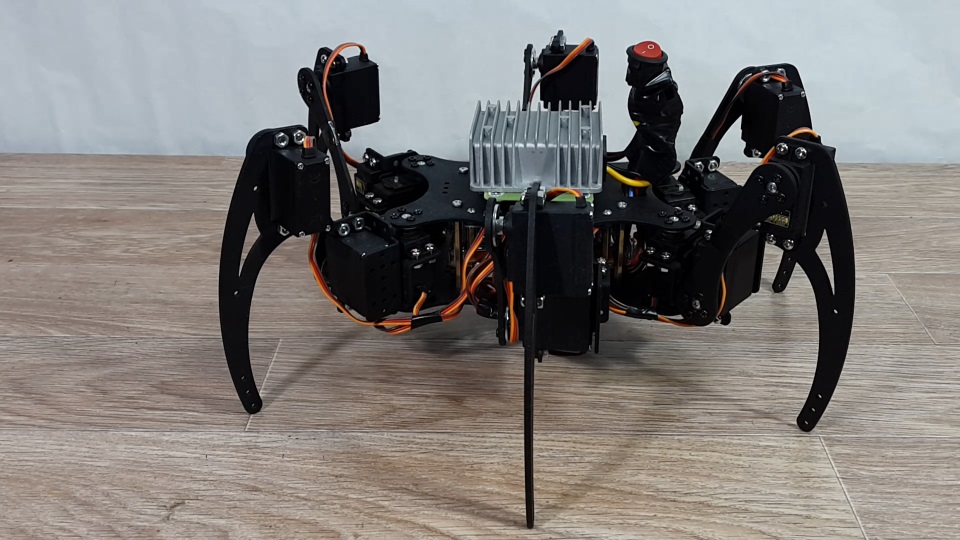
Механическая часть собирается без особых вопросов. Но вот как разместить все остальное? Здесь есть где разгуляться творческой мысли. Отверстия на корпусе практически совпали с отверстиями на плате микроконтроллера. Поэтому место его установки сразу однозначно было определено. Аккумулятор тоже спрячем внутри корпуса. В итоге места внутри практически не остается.
Выходное напряжение аккумулятора я выбрал 11.1В. Сначала хотел 7.4В, так как в контроллере есть стабилизатор, а сервоприводы выдерживают напряжение до 7В, плюс падение на подводящих проводах. Но потом решил не рисковать, ведь стоимость сервоприводов составляет половину цены всех деталей целиком. Поэтому решил сделать все правильно, подобрал конвертер 12В в 5В с максимальным током 30А. Этого с запасом хватит, чтобы запитать 18 сервоприводов даже при работе на упор. Вот и аккумуляторная батарея получилась на 11.8В.
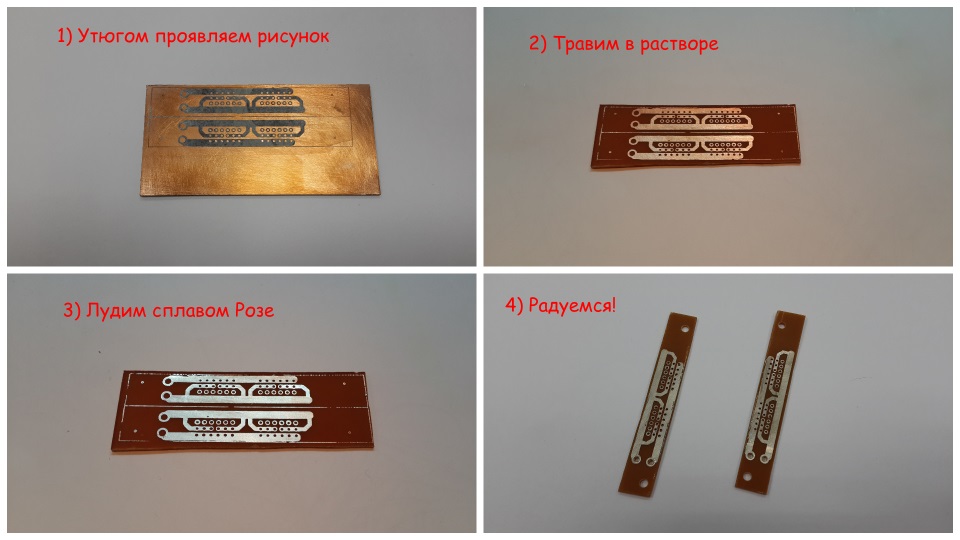
Источник питания разместим сверху. Для подключения сервоприводов я сделал две переходные платы, которые органично вписались в существующую конструкцию. Я считаю, что получилось компактно и красиво.
В комплекте механических деталей прилагались подшипники (6шт) для установки плечевых суставов на корпус. Без них будет повышенное трение и излишняя нагрузка на вал сервопривода.
Сборка
Скажу сразу, что очень удобно пользоваться готовым комплектом механических деталей. Не надо ничего сверлить, пилить, гнуть. В общем, просто сказка! Шестеренки, которые крепятся на вал сервопривода, нужно обязательно ставить металлические, а не те пластиковые, что идут в комплекте. Самое главное – это правильно собрать «плечевой» сустав гексапода. Нужно определенным образом соединить две изогнутые детали, я почему-то назвал их каретками.

В каждую такую конструкцию потом будет установлено два сервопривода. Необходимо обратить внимание, что передние ноги отличаются от средних и задних расположением осевого винта. Детали Femur (бедро) и Tibia (голень) соединяем под углом 120°. Это будет среднее положение конечности, диапазон ее хода составит ±60°, от выпрямленной ноги до согнутой под 60°. К плечам крепим ноги под углом 0°. Ноги растут у него от плеч, вот такой монстр))) Но мне было проще называть тазобедренный сустав плечевым. Парадокс!
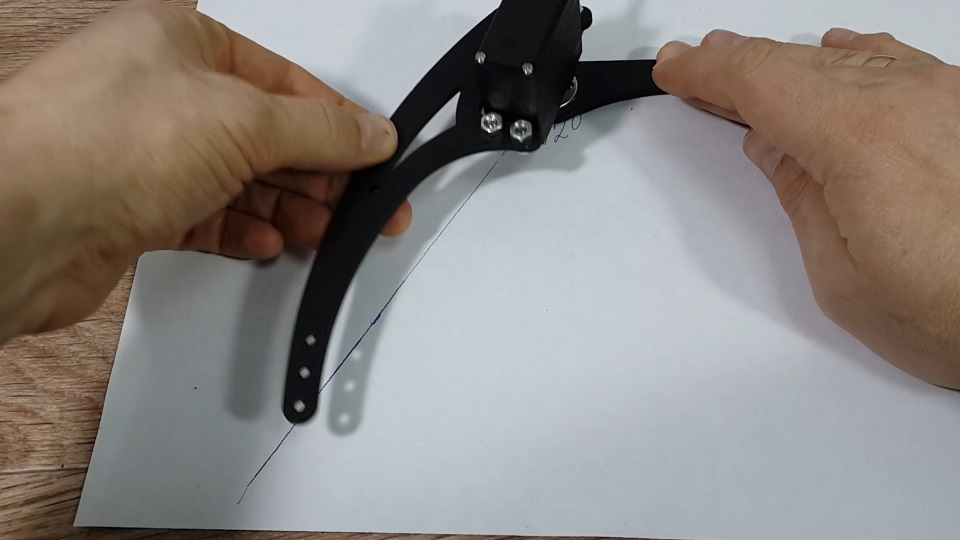
Ну и наконец ставим плечи на корпус. Средние ноги ставим параллельно, а задние и передние – под углом 45 градусов. Чтобы проще понять, смотрите рисунок ниже.
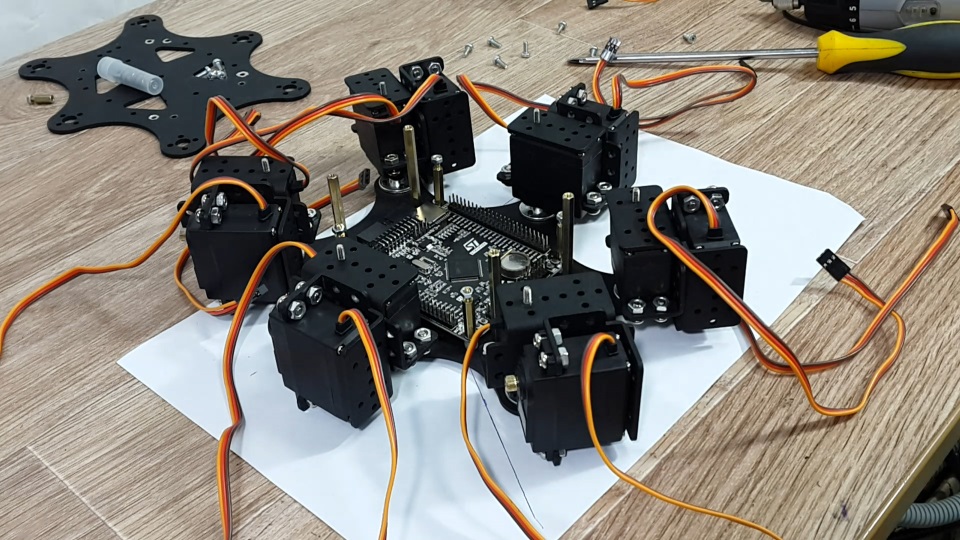
Устанавливаем плату микроконтроллера на корпус через пластиковые шайбы, чтобы обеспечить зазор между корпусом. Микроконтроллер STM32F407 был выбран, что называется с запасом. В будущем я планирую развивать проект дальше, поэтому дополнительные вычислительные мощности мне пригодятся.
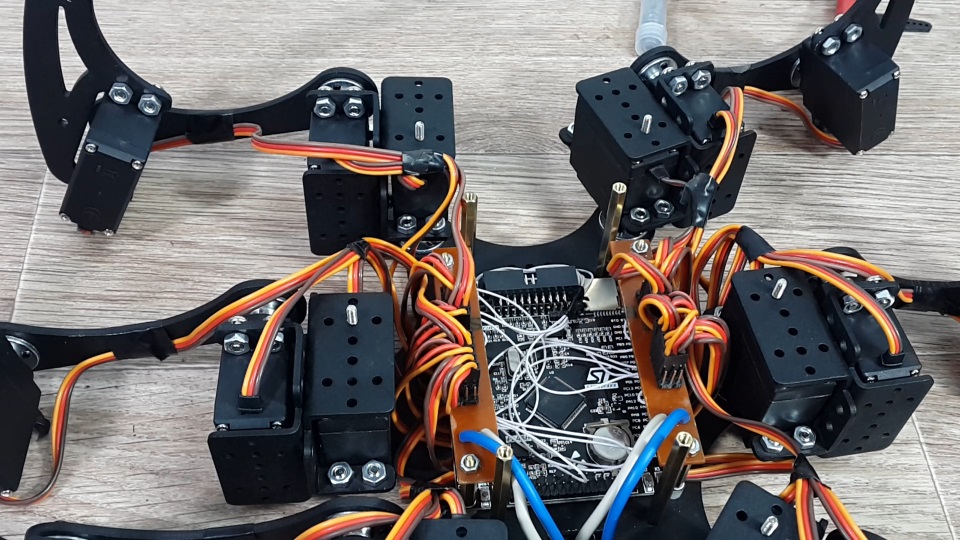
Схема электрическая принципиальная представлена ниже:

Для подключения сервоприводов я разработал и изготовил компактные платы-переходники. Наконец-то опробовал ЛУТ (лазерно-утюжную технологию). Результат меня вполне устроил.
Все собираем, подключаем сервоприводы, где надо подпаиваем провода. Крепим аккумулятор к нижней пластине корпуса. Не забываем про подшипники из комплекта и закрываем крышку. Сверху ставим источник, выполняем монтаж проводов, укладываем их аккуратно. Все! Робот-паук готов!
Программное обеспечение
Основной каркас ПО был уже написан в предыдущем проекте, смотрите статью «Робот-муравей: Программирование». Основные изменения связаны с переходом на новый микроконтроллер STM32F407VET6. Еще я обнаружил косяк, связанный с алгоритмом поворота. В прошлой версии при повороте робот как бы перетаптывается с ноги на ногу. Т.е. делает шаг, потом переходит в исходное положение и т.д. В общем нет непрерывного движения. Старый вариант можно посмотреть здесь. В новой версии я это исправил, робот-паук изящно крутится на месте вокруг своей оси.
После проведения калибровки конечностей он может ходить в разные стороны и с регулируемой скоростью. Двигать корпусом и вращать им же. Садиться и вставать. И многое другое!
Все необходимые файлы (прошивка, пульт, инструкция) можно скачать ниже:
Как самому собрать такого робота можно посмотреть на видео ниже.
Дальнейшие планы
Следующие статьи будут посвящены дальнейшему усовершенствованию робота-паука. Я планирую добавить видеокамеру, гироскоп, клешни и многое другое. Всем спасибо, до новых встреч!
Отличные поучительные видео! Алексей, не останавливайся на достигнутом,
новых творческих идей!
Спасибо, буду двигаться вперед)))
Добый день!!!!!!!!!! Очень заитересовал ваш проект, хочу повторить его!!!! А можна более детальную схему подключения платы STM32F407VET6 к сервоприводам ? Если можно то пришлите на эл.почту! Зарание Благодарю!!!
Добрый день! Схема и все материалы отправлены на почту. Скоро они появятся и на сайте.
Добрый день а нет возможности сфотографировать детали с линейкой или чертежи металлических деталей. Был бы очень признателен.
Добрый день!
Если вопрос еще актуален, могу сделать.